中心複合計画(Central Composite Design, CCD)
実験計画法は、どの因子が重要か選別するスクリーニング実験と、選別した因子に対して曲面性も考慮して行う最適化実験の2つに大別することが出来ます。前者は完全実施計画や直交表などが当てはまり、後者の代表的な手法が中心複合計画と呼ばれるものです。
中心複合計画
中心複合計画は応答曲面法のための計画です。応答曲面法というと仰々しいですが、線形(1次)ではなく2次の項まで考慮した重回帰分析です。重回帰の予測精度が偏らないように、調整した実験計画が中心複合計画です。
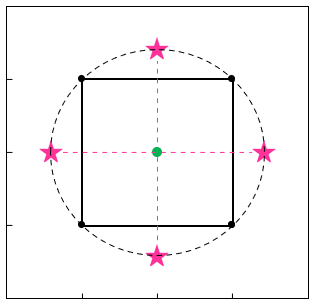
まず2因子2水準の完全実施計画 (full factorial design)を考えます。

中心複合計画では、曲面モデルを作成するため下図で緑色で示す中心点 (center point)と、

下図で緑色で示す軸点 (axial point)又は星点 (star point)とも呼ばれる点を設定します。

中心点から軸点までの距離をアルファと呼びます。

実験を始める前は最適点が何処にあるかわからないので、なるべく偏らない計画が望ましいです。アルファを適切に選べば、どの実験点でも予測精度(予測分散)が等しくなるように設定することが出来ます。例えば2変数では[math] \displaystyle \sqrt 2 = 1.4142 [/math]に設定することにより実現します。
2因子の場合は円周上に要因計画の実施点と軸点が位置しますが、必ずしもn次元球面上に設定すれば予測精度が等しくなるわけではありません。
中心複合計画のアルファについて
中心複合計画のアルファ設定方法について述べます。
1. 回転可能性 (rotatable)
まず中心複合計画で回転可能 (rotatable)性というものがあります。この場合、中心点以外のどの実験点でも予測精度が等しくなります。これを実現するためには、もしk因子2水準の完全実施要因計画では、要因計画の計画点数[math] \displaystyle F=2^k [/math]と置くと、[math] \displaystyle \alpha = {F}^{1/4} [/math]において実現できます。
2. 球状 (spherical)
実験点をを中心点から球状に設定すれば回転可能に思えますが、予測分散の観点から必ずしも回転可能にはなりません。幾何学的な計算から[math] \displaystyle \alpha = \sqrt {k} [/math]と置くと実現されます。
中心複合計画で回転可能な計画と球状な計画でのアルファを下記に示します。[math] \displaystyle k=2,4 [/math]の場合は等しく、[math] \displaystyle k \le 5 [/math] の場合はそれほど変わりません。実用上で実験規模を考えると[math] \displaystyle k \gt 5 [/math]は考えづらいので球状でも十分かもと思ったりします。計算機実験などはその限りではないですね。

3. 直交性 (orthogonal)
次に直交性 (orthogonality)というものがあります。この場合、中心点以外のどの実験点でも予測精度が等しくなります。同様にk因子2水準の完全実施要因計画では、[math] \displaystyle \alpha = \sqrt { \frac { \sqrt {NF} -F}{2} } [/math]において実現できます。ここで中心点の実験回数を[math] \displaystyle N_0 [/math]、軸点の実験回数を[math] \displaystyle r [/math]として[math] \displaystyle N = F + (2k)r + N_0 [/math]です。
4. 回転可能かつ直交
回転可能性と直交性を同時に満たすことは可能で、この場合[math] \displaystyle N_0 = 4 \sqrt {F} + 4 - 2k [/math]です。回転可能性と直交性を同時に満たすには
[math] \displaystyle \sqrt { \frac { \sqrt {NF} -F}{2} } = {F}^{1/4} [/math]
[math] \displaystyle {( \frac { \sqrt {NF} -F}{2} )}^2 = F [/math]
[math] \displaystyle \sqrt {NF} -F = \pm 2 \sqrt {F} [/math]
[math] \displaystyle \sqrt {NF} = F \pm 2 \sqrt {F} [/math]
[math] \displaystyle \sqrt {N} = \sqrt {F} \pm 2 [/math]
[math] \displaystyle N = F \pm 4 \sqrt {F} + 4 [/math]
ここで軸点の実験回数[math] \displaystyle r = 1 [/math]の場合、[math] \displaystyle N = F + 2k + N_0 [/math]より
[math] \displaystyle F + 2k + N_0 = F \pm 4 \sqrt {F} + 4 [/math]
[math] \displaystyle N_0 = \pm 4 \sqrt {F} + 4 - 2k [/math]
上記は[math] \displaystyle F=2^k [/math]で、[math] \pm [/math]がマイナスの場合は負値になってしまうので下記になります。
[math] \displaystyle N_0 = 4 \sqrt {F} + 4 - 2k [/math]
5. 面心立方計画 (face centered cube design, FCD)
[math] \displaystyle \alpha = 1 [/math]のケースです。この場合回転可能性などは無視して、軸点をギリギリ外側に設定します。[math] \displaystyle \alpha [/math]を大きくした場合に実験不可能な領域があると、計画点をギリギリに設定した方が効率的です。この場合、中心点を増やしてもあまり予測精度は変わりません。2点程度あれば十分です。実用上は実験可能領域に制約が入る事は往々にしてあるので、面心立方計画の性質を知っている事は重要と思います。

中心複合計画のアルファ一覧
中心複合計画のアルファ設定方法について述べます。
| k | [math] \alpha [/math] | # of center point |
|---|---|---|
| rotatable | [math] \displaystyle {F}^{1/4} [/math] |
- |
| spherical | [math] \displaystyle \sqrt {k} [/math] |
- |
| orthogonal | [math] \displaystyle \sqrt { \frac { \sqrt {NF} -F}{2} } [/math] |
- |
| rotatable and orthogonal | [math] \displaystyle {F}^{1/4} [/math] |
[math] \displaystyle N_0 = 4 \sqrt {F} + 4 - 2k [/math] |
| face centered | [math] \displaystyle 1 [/math] |
- |
まとめ
実験計画法のうち、最適化に適用される中心複合計画について述べました。取り合えず書き下したので、次回から日々の疑問を実験します!